Ein Artikel mit dem Titel „Queering Sex Robots Beyond Diversifying Design? Insights from Queer Lacanian Psychoanalysis and New Materialism“ von Maaike van der Horst und Anna Puzio wurde im März 2026 in der Zeitschrift Philosophy & Technology publiziert. Erstaunlicherweise werden darin mehrere für das Thema hochrelevante Arbeiten nicht erwähnt, darunter wissenschaftliche Texte von Tanja Kubes und Oliver Bendel. Infolgedessen wirken Ansprüche der Autorinnen in Bezug auf Originalität weniger überzeugend, als sie es sonst hätten sein können. Nach einem Austausch mit einem der Herausgeber der Zeitschrift, Luciano Floridi, reichte Oliver Bendel daher einen Kommentar ein. Dieser würdigt zwar den wertvollen Beitrag des Artikels, insbesondere die Verknüpfung von queerer lacanianischer Psychoanalyse und neuem Materialismus, argumentiert jedoch, dass die Darstellung der bisherigen Forschungslage unvollständig sei. Mehrere als neuartig präsentierte Schlüsselthemen und Vorschläge – darunter Kritik an der Nachahmung humanoider Züge, neomaterialistische Ansätze zu Sexualität und Technologie, queere Designkonzepte, relationale Ontologie und transformative Formen von Sexrobotern – waren bereits in früheren Arbeiten von Tanja Kubes und Oliver Bendel entwickelt worden. Das Auslassen dieser Beiträge beeinträchtigt die Beurteilung der Originalität, die Rekonstruktion der intellektuellen Entwicklung des Fachgebiets und die Zuweisung wissenschaftlicher Anerkennung. Der Kommentar fordert daher eine umfassendere wissenschaftliche Genealogie queerer und neomaterialistischer Ansätze zu Sexrobotern und argumentiert, dass sorgfältige Zitierpraktiken für die Wahrung der Integrität des akademischen Diskurses unerlässlich sind. Der Artikel „Who Queered the Sex Robot? Notes on Attribution and Conceptual History“ wurde am 10. Juni 2026 in Philosophy & Technology veröffentlicht und ist über link.springer.com/article/10.1007/s13347-026-01123-3 abrufbar.
Die aktuelle Ausgabe der VDI nachrichten widmet sich Allzweckrobotern und anderen humanoiden Robotern. Dabei stehen weniger die Ankündigungen und Investitionen der Branche im Mittelpunkt als vielmehr die Voraussetzungen für die gesellschaftliche Akzeptanz solcher Maschinen. Der Schwerpunkt beleuchtet – so Martin Ciupek, Redakteur der Zeitschrift, auf LinkedIn – den Stand der Technik, die Herausforderungen auf dem Weg zu wirklich autonomen Systemen, aktuelle Trainingsmethoden für Roboter sowie die zugrunde liegenden IT- und KI-Architekturen. Für die Einordnung ethischer und gesellschaftlicher Aspekte wurde unter anderem der Technikphilosoph, Informations- und Maschinenethiker Oliver Bendel befragt. Die Beiträge zeigen, dass trotz großer Fortschritte und hoher Erwartungen noch wichtige technische, organisatorische und gesellschaftliche Fragen zu lösen sind, bevor Allzweckroboter und andere humanoide Roboter flächendeckend in Fabriken und im Haushalt bzw. Alltag eingesetzt werden können. Die gedruckte Ausgabe ist ab dem 13. Juni 2026 erhältlich. Die digitalen Beiträge erscheinen laufend auf www.vdi-nachrichten.com.
An article titled „Queering Sex Robots Beyond Diversifying Design? Insights from Queer Lacanian Psychoanalysis and New Materialism“ by Maaike van der Horst and Anna Puzio was published in the journal Philosophy & Technology in March 2026. Surprisingly, it does not reference several works that are highly relevant to the topic, including publications by Tanja Kubes and Oliver Bendel. As a result, some of the article’s claims to originality appear less convincing than they might otherwise have been. Following an exchange with one of the journal’s editors, Luciano Floridi, Oliver Bendel therefore submitted a commentary, which was published in Philosophy & Technology on June 10, 2026. From the abstract: „This commentary discusses Maaike van der Horst and Anna Puzio’s article ‚Queering Sex Robots Beyond Diversifying Design? Insights from Queer Lacanian Psychoanalysis and New Materialism‘. While acknowledging the article’s valuable contribution, particularly its integration of Queer Lacanian Psychoanalysis and New Materialism, the commentary argues that its account of prior scholarship is incomplete. Several key themes and proposals presented as novel – including critiques of humanoid mimicry, new-materialist approaches to sexuality and technology, queer design concepts, relational ontology, and transformative sex robot forms – had already been developed in earlier work by Tanja Kubes and Oliver Bendel. The omission of these contributions affects assessments of originality, the reconstruction of the field’s intellectual development, and the allocation of scholarly credit. The commentary therefore calls for a more comprehensive scholarly genealogy of queer and new-materialist approaches to sex robots and argues that careful citation practices are essential to maintaining the integrity of academic discourse.“ The article „Who Queered the Sex Robot? Notes on Attribution and Conceptual History“ can be accessed at link.springer.com/article/10.1007/s13347-026-01123-3.
Unter dem Titel „KI trifft Autismus“ veranstaltete autismus schweiz am 30. Mai 2026 eine Fachtagung, die sich der Rolle künstlicher Intelligenz in der Gesellschaft und im Kontext von Autismus widmete. Fachliche Impulse lieferten Maximilian Popp (No Isolation), Matthias Schüssler (Tages-Anzeiger), Dr. Maya Schneebeli (KJPP), Prof. Dr. André Frank Zimpel (Universität Hamburg) und Prof. Dr. Oliver Bendel (Hochschule für Wirtschaft FHNW). Eine Referentin fiel aus. In seinem Vortrag „Soziale Roboter und Physical AI bei Autismus“ stellte Oliver Bendel mehrere Beispiele und Prototypen vor und ordnete diese aus technischer und ethischer Perspektive ein. Dabei erläuterte er auch, was unter Inclusive Robotics und Inclusive AI zu verstehen ist. Moderator war der bekannte SRF-Redakteur Bernard Senn. Die Teilnahme war sowohl vor Ort als Live-Anlass im großen Hörsaal Nord des Universitätsspitals Zürich als auch zeitversetzt über eine On-Demand-Version möglich. Die Aufzeichnung steht etwa zehn Tage nach dem Anlass bis Ende Juli 2026 über das Veranstaltungsportal zur Verfügung. Weitere Informationen sind über portal.autismus.ch/veranstaltungen/202 abrufbar.
Abb.: Auch über AIBI wurde gesprochen (Foto: LivingAI)
Vom 1. bis 4. Juli 2026 trifft sich die Community der Sozialen Robotik zur 18th International Conference on Social Robotics (ICSR + ART 2026) in London. Getagt wird im Senate House der University of London, einem der bekanntesten akademischen Gebäude Großbritanniens. Forscher, Entwickler, Künstler und Vertreter der Industrie diskutieren dort aktuelle Entwicklungen und zukünftige Perspektiven sozialer Roboter sowie animaloider, humanoider und mythomorpher Gestaltung. Besonders ist in diesem Jahr die Verbindung von Robotik und Kunst. Neben dem wissenschaftlichen Programm bietet die Konferenz mit Formaten wie der Grand Challenge, dem Robot Fringe, den Debates (die mit dem Debate Room einen exklusiven Ort haben) und einem Industry Day zahlreiche Möglichkeiten für Austausch und Erkenntnisgewinn. Die General Chairs Hooman Samani und Saina Akhond, beide von der University of the Arts London, und ihre Mitstreiter von Hochschulen auf der ganzen Welt setzen damit gezielt auf Interdisziplinarität, Innovation und Diskurs. Weitere Informationen sind über icsr2026.uk verfügbar.
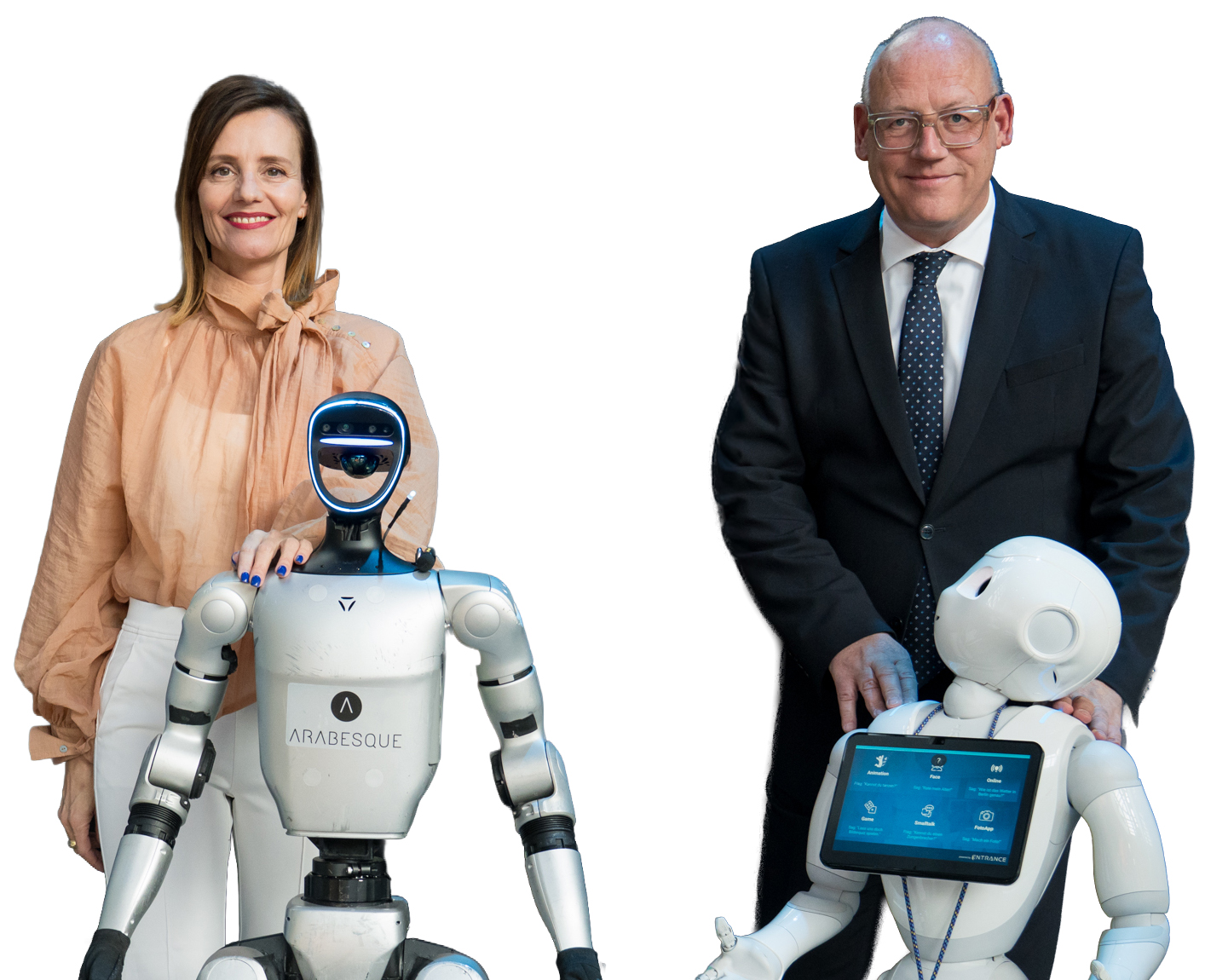
Nach generativer KI ist Robotik das Thema der Stunde, und natürlich kann man beides verbinden. Am 21. Mai 2026 lud Walder Wyss im Rahmen von „Off the Record“ ab 18 Uhr zu einem Robotikevent ins Kraftwerk Zürich ein. Es waren Freunde und Kunden der Anwaltskanzlei eingeladen. Es ging um klassische Serviceroboter ebenso wie um Allzweckroboter – und um soziale Roboter. Auf dem Panel waren Prof. Dr. Oliver Bendel, Technikphilosoph und Wirtschaftsinformatiker, der sich seit einem Vierteljahrhundert intensiv mit Chatbots, Sprachassistenten und sozialen Robotern beschäftigt, und Sylvia Stocker, CEO von Arabesque. Es moderierten Ramona Wyss und Florian Gunz. Seit 27. Mai 2026 stehen die Fotos zur Veranstaltung zur Verfügung. Zu sehen sind auf ihnen nicht nur die genannten Personen, sondern auch die Roboter, die im Raum waren, wie Unitree G1, Mars und Pepper. Im Imageflyer schreibt die Anwaltskanzlei über sich: „We are a dynamic law firm with flat structures and a very friendly atmosphere. More than 300 legal experts make Walder Wyss one of the most successful Swiss commercial law firms. Our clients include national and international companies, publicly held corporations and family businesses as well as public law institutions and individuals.“ (Imageflyer Walder Wyss)
Der Artikel „Es muss nicht immer ein humanoider Roboter sein: Mythomorphe Gestaltung als Option und Perspektive“ von Oliver Bendel ist am 13. Mai 2026 in Wiley Industry News erschienen. Der Technikphilosoph führt den Begriff des Mythomorphen ein, um die Kategorien des Humanoiden und Animaloiden (Zoomorphen) zu erweitern. Dadurch lassen sich Roboter wie Mirokaï, Furby und Cozmo besser einordnen als bisher. Aus dem Abstract: „Soziale Roboter sind oft humanoid oder zoomorph gestaltet. Zudem gibt es dinghafte Gestaltung, bei der versucht wird, eine Nachahmung von Lebewesen zu vermeiden. Allerdings können humanoide oder zoomorphe Merkmale vorkommen, etwa menschlich wirkende Augen oder ein tierlicher Schwanz. Weniger üblich, aber durchaus vorhanden ist eine weitere Richtung, die mythomorph genannt werden kann. Hier sind nicht oder nicht direkt Menschen oder Tiere das Vorbild, sondern Außerirdische, Fantasyfiguren oder mythologische Figuren. In diesem Beitrag wird zuerst darauf eingegangen, was unter mythomorpher Gestaltung verstanden werden kann. Dann werden Beispiele für soziale Roboter mit dieser Ausrichtung gesammelt, beschrieben und eingeordnet. Sodann findet eine ontologische, ästhetische und ethische Diskussion statt. Dabei werden jeweils Chancen und Risiken genannt. Es zeigt sich, dass mythomorphes Design als eigenständige Perspektive innerhalb des breiteren Gestaltungsraums der Sozialen Robotik verstanden werden kann.“ Der Artikel kann hier aufgerufen werden.
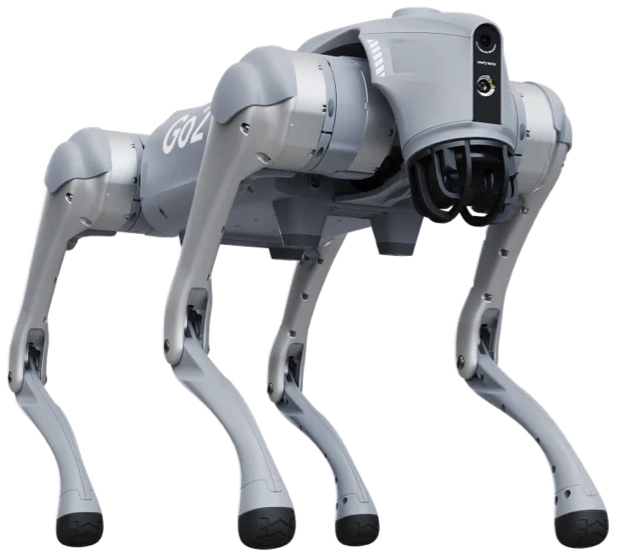
Im neuen Buch „Tier-Maschine-Interaktion“ von Oliver Bendel (Springer Gabler, 2026) werden zahlreiche Projekte vorgestellt, die Begegnungen zwischen Tieren und Robotern bzw. Drohnen zum Gegenstand haben. Dazu gehört die „Robodog“-Studie, die 2025 an der Hochschule für Wirtschaft FHNW durchgeführt wurde. Selina Rohr untersuchte, wie Haushunde auf den vierbeinigen Roboter Unitree Go2 – von Projektinitiator Oliver Bendel Bao genannt – reagieren und wie ihre Besitzer solche Roboter in gemeinsam genutzten öffentlichen Räumen wahrnehmen. Es zeigte sich, dass die meisten Hunde vorsichtig, aber nicht aggressiv waren. Das Interesse nahm zu, sobald sich der Roboter bewegte, während visuelle Modifikationen kaum Wirkung zeigten. Solche Projekte sind wichtig, weil Begegnungen zwischen Tieren und Robotern ständig zunehmen, in der Landwirtschaft, aber auch in Ballungsgebieten und Haushalten. Gerade erleben robotische Vierbeiner wie Spot und Unitree Go2 sowie robotische Zweibeiner wie Digit, Apollo, Figure 03 und NEO einen Boom, wobei letztere als Allzweckroboter vermarktet werden. Sie alle müssen nicht nur menschenfreundlich, sondern auch tierfreundlich gestaltet werden. Das Buch „Tier-Maschine-Interaktion“ kann über link.springer.com/book/10.1007/978-3-658-50921-7 heruntergeladen bzw. erstanden werden.
Oliver Bendel’s paper „Towards a Discipline of Animal-Machine Interaction“ has been accepted for presentation at Robophilosophy 2026. The renowned conference on the philosophical aspects of social robotics has been held since 2014 and will take place in Dublin this year. Autonomous and semi-autonomous machines such as robots and drones are increasingly moving into natural and urban environments, leading to a growing number of interactions between animals and machines and raising corresponding new ethical and conceptual challenges. This article proposes animal-machine interaction (AMI) as a distinct discipline concerned with the design and governance of machines that encounter animals. After clarifying core concepts and delineating AMI from related fields, the article highlights the role of machine ethics in developing animal-friendly systems. Selected application examples illustrate how machines can support animal survival and well-being, while the ethical discussion addresses both opportunities and risks of technological intervention in animal habitats. It is becoming clear that AMI is an increasingly important field of research, but one that must be constantly reoriented and questioned. Oliver Bendel has participated in the biennial conference series since 2018. That year, he delivered a keynote speech in Vienna alongside Hiroshi Ishiguro, Guy Standing, and Joanna Bryson. His book „Tier-Maschine-Interaktion“ („Animal-Machine Interaction“) was recently published by Springer Gabler.
The paper „Reading Between the Laughs: A Human-Referenced Audio Evaluation of MLLMs for Social Robotics“ by Sahan Hatemo, Katharina Kühne, and Oliver Bendel has been accepted at ICSR + Art 2026. In this work, the researchers investigated whether today’s leading AI models can distinguish authentic from non-authentic laughter based solely on audio signals. The results revealed striking differences in model behavior: OpenAI systems showed a strong tendency to interpret most laughter as genuine, while Gemini models were generally more skeptical. Despite these contrasting biases, several models performed significantly better than chance, with Gemini 2.5 Pro achieving the strongest overall results. Their analysis also demonstrated that less capable models often relied on superficial cues such as pitch, disproportionately labeling higher-pitched laughter as less authentic, whereas the top-performing model appeared to focus on more sophisticated voice quality features, suggesting a deeper understanding of laughter authenticity. These findings highlight the growing potential of multimodal large language models in social robotics, where accurately interpreting subtle social signals like laughter could play an important role in trust, communication, and relationship building between humans and robots. The 18th International Conference on Social Robotics will take place in London, UK, from 1-4 July 2026. ICSR is the leading international forum that brings together researchers, academics, and industry professionals from across disciplines to advance the field of social robotics.
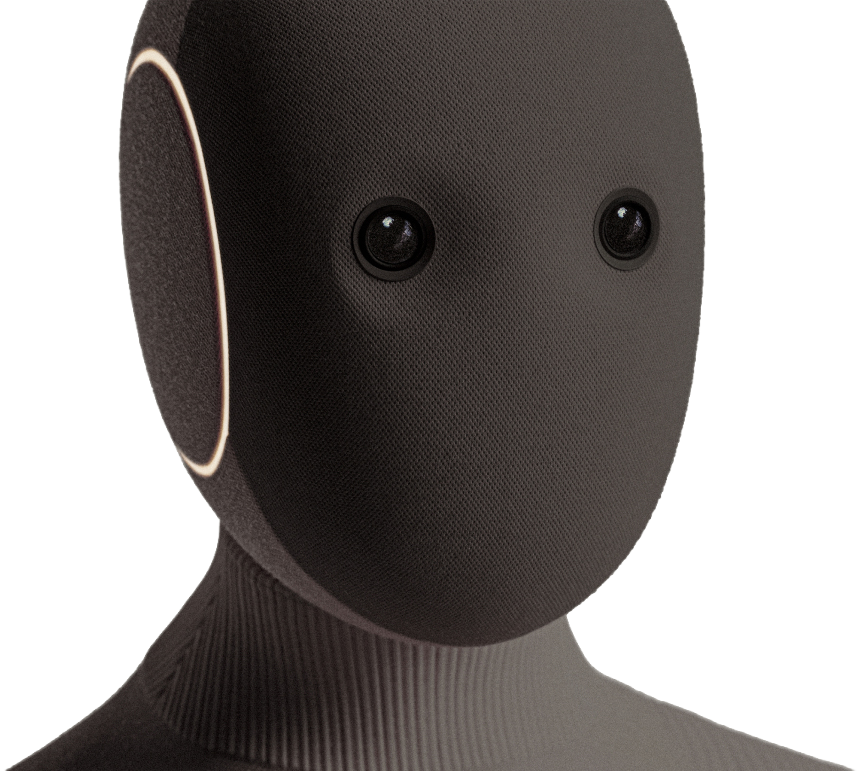
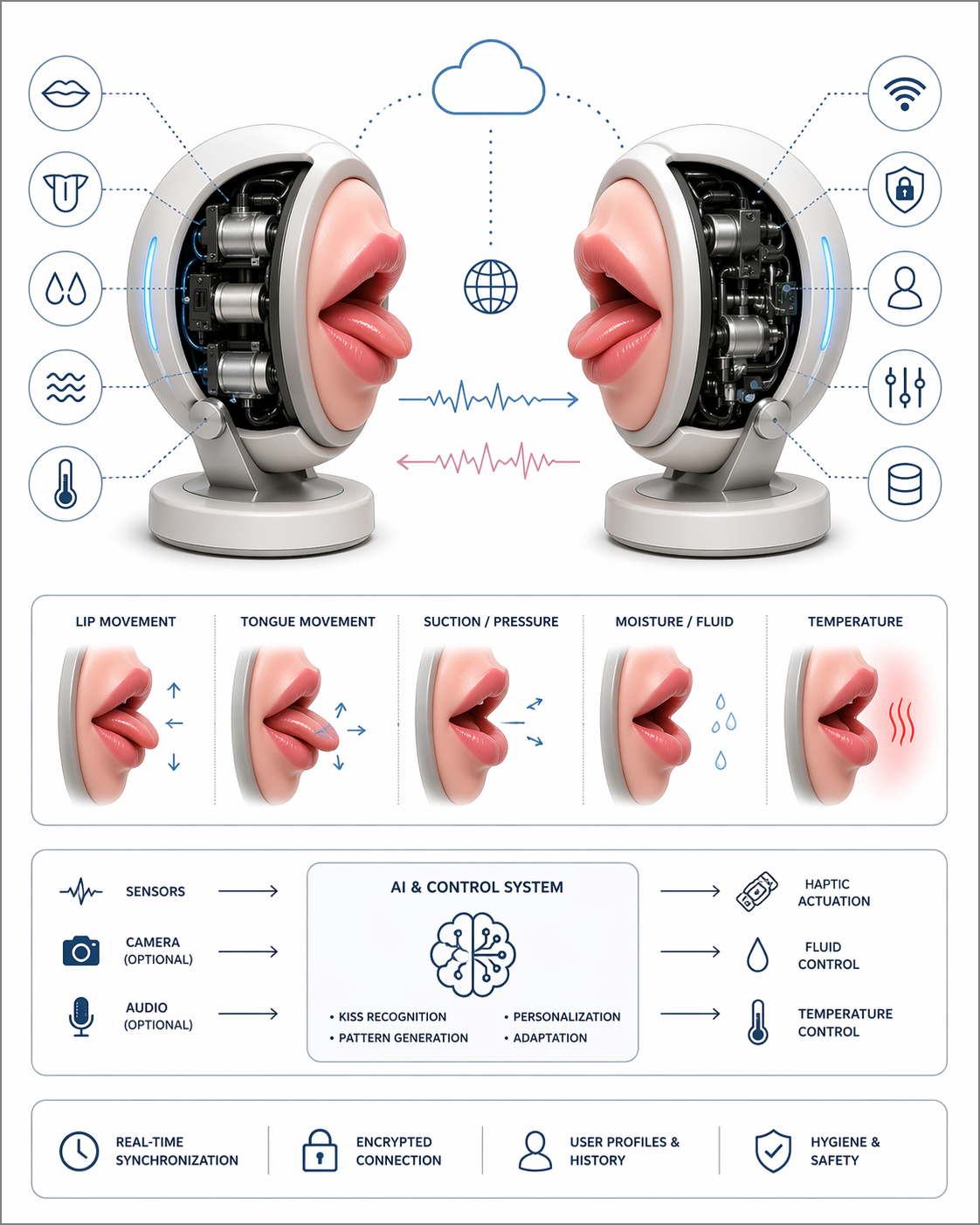
The paper „Kiss Me More: Artificial Lips for Intimate Encounters“ by Oliver Bendel has been accepted at ICSR + Art 2026. Kisses have different functions and meanings depending on culture, context, and partner; they can serve as a greeting, express gratitude, or be part of sexual interaction. When partners are separated but still wish to show affection, teledevices can offer a solution. Since 2011, several prototypes and products for remote kissing have been developed, including the Kissenger, a prototype created by Hooman Samani, to which the present work also pays tribute. Although these systems are already conceptually and technically advanced, there is still room for further development, especially with regard to intimacy and sexuality. The paper therefore formulates specific requirements and outlines possible implementations, resulting in the concept of the KissMachine, which is critically discussed with respect to its technical challenges and ethical implications. The 18th International Conference on Social Robotics will take place in London, UK, from 1–4 July 2026. ICSR is the leading international forum that brings together researchers, academics, and industry professionals from across disciplines to advance the field of social robotics.
Fig.: An illustration of the KissMachine (not part of the paper)
A new article titled „Beyond Diversifying Design? Insights from Queer Lacanian Psychoanalysis and New Materialism“ (van der Horst & Puzio, 2026) has been published in Philosophy & Technology. The authors argue that queering sex robots should go beyond diversifying their physical design and instead involve a broader reconsideration of sexuality, identity, and human-technology relations. The paper starts from a critique widely discussed in the literature: current sex robot models largely reproduce heteronormative and stereotypical representations of femininity. Similar observations and related arguments can be found in earlier contributions in the volume „Maschinenliebe“ (Bendel 2020). In that book, Tanja Kubes addresses the topic in her chapter „Queere Sexroboter“, while Oliver Bendel discusses transformations of gender and embodiment in „Trans-Formers“. Both contributions also refer to examples such as the Harmony robot from Realbotix/RealDollX. The main novelty of the new article lies in its theoretical framework, which combines Queer Lacanian psychoanalysis and New Materialism. Given the thematic overlap and the small number of publications on queer perspectives on sex robots, it is somewhat surprising that the earlier contributions in „Maschinenliebe“ are not referenced. This book is predominantly written in German, but in times of large language models this should hardly pose a barrier. Moreover, the chapters by Kubes and Bendel have already been cited in several English-language academic publications.
Everlast ist eine Medienagentur aus Ulm. Leonard Martin Schmedding, Co-Founder, war im März 2026 wie bereits vor einem Jahr und vor zwei Jahren im Gespräch mit Prof. Dr. Oliver Bendel. Das Video wurde auf YouTube veröffentlicht. Es geht um Themen wie „Humanoide Roboter, Bewusstsein & Zukunft“ (Teaser YouTube). Humanoide Roboter sind – so hat es Oliver Bendel im Wirtschaftslexikon von Springer Gabler beschrieben – Roboter mit menschenähnlichem Aussehen. Das Spektrum reicht dabei von einer abstrakten Gestalt mit menschlichen Merkmalen über ein cartoonhaftes menschenähnliches Äußeres bis hin zu realistischem oder hyperrealistischem Design nach unserem Vorbild. Bei hoher Ähnlichkeit spricht man von (Vorläufern von) Androiden. Manche dieser Roboter zählen – wie auch kleine Gadgets in der Art von Rabbit R1 oder Wearable Social Robots wie AIBI – zu Physical AI. Zu dieser stellt Oliver Bendel im gleichen Lexikon fest: „Es geht nicht nur darum, teilautonome oder autonome Maschinen mit Hilfe von KI aufzuwerten und zu erweitern, wie im Falle von Gesichtserkennung, Gestikerkennung und Emotionserkennung oder von Chatbots für soziale Roboter, sondern darum, für die KI gleichsam einen Körper zu suchen, in dem sie sich entfalten und beweisen kann.“ Insgesamt steht der Technikphilosoph und Wirtschaftsinformatiker den Entwicklungen in KI und Robotik positiv gegenüber. Das Video kann seit 13. März 2026 über www.youtube.com/watch?v=aKNjNaipakI abgerufen werden.
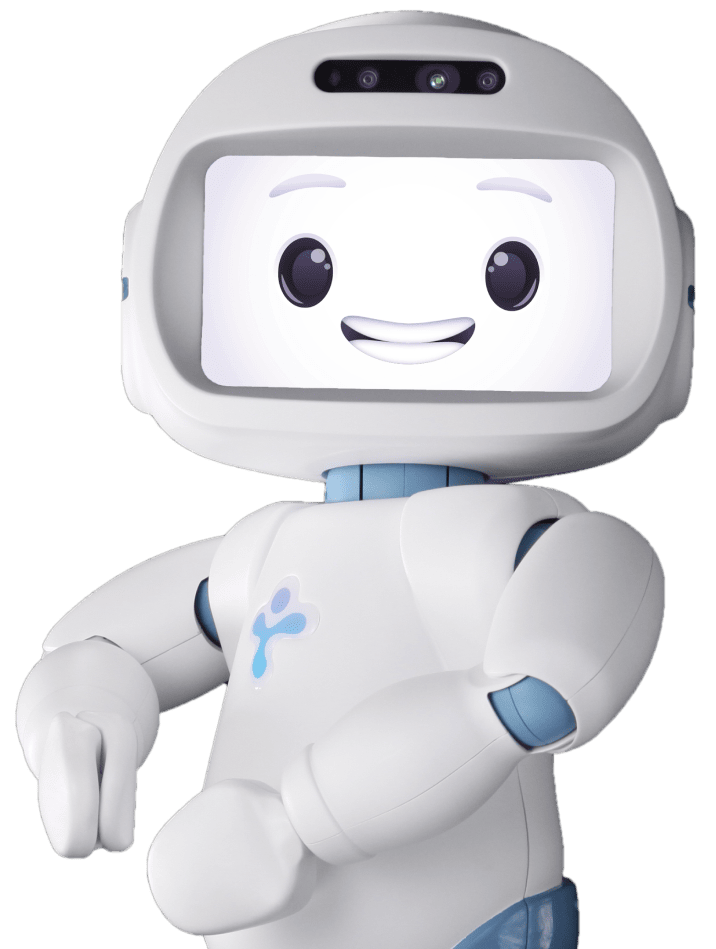
Abb.: Der Wearable Social Robot Eiliko (Foto: Energize Lab)
„aiLights – Robotics“ ist eine neue Vortrags- und Diskussionsreihe im Netz, die KI und Robotik behandelt. Am 20. April 2026 gibt es die Ausgabe „aiLights – Robotics @ FHNW: Soziale Roboter: Begriffe, Beispiele und Herausforderungen“. Prof. Dr. Oliver Bendel stellt in seinem Vortrag zunächst aktuelle Entwicklungen sozialer Roboter vor, wobei er auf Pflege, Therapie und Haushalt fokussiert. Exkurse gibt es zu Wearable Social Robots und General-Purpose Robots. Er diskutiert dann soziale und ethische Herausforderungen, auch mit der Zuhörerschaft. Oliver Bendel ist studierter Philosoph und promovierter Wirtschaftsinformatiker. Er lehrt und forscht an der Hochschule für Wirtschaft FHNW. Schwerpunkte sind KI-Systeme und soziale Roboter aus der Perspektive von Informations- und Maschinenethik sowie Technikphilosophie. Hinter aiLights steckt Sabine Wildemann, Ambassador des Davos Tech Summit und Co-Initiator der Swiss {ai} Weeks. Ihr Motto lautet „Connecting people with AI – creating spaces for learning, sharing, and shaping across sectors“. Die Anmeldung für den Onlinevortrag erfolgt über luma.com/l8akl82h.
Das Buch „Soziale Roboter: Technikwissenschaftliche, wirtschaftswissenschaftliche, philosophische, psychologische und soziologische Grundlagen“ (Hrsg. Oliver Bendel) hat am 1. März 2026 400.000 Accesses auf Springer Nature Link erreicht. Es besteht aus fünf Teilen: „Grundlagen, -begriffe und -fragen“, „Soziale Robotik und andere Disziplinen“, „Gestaltung, Interaktion und Kommunikation“, „Anwendungsbereiche sozialer Roboter“ und „Die Zukunft sozialer Roboter“. Es sind, das Vorwort mitgezählt, 30 Beiträge, mit ca. 35 Abbildungen, bei ca. 570 Seiten. Der Untertitel lautet: „Technikwissenschaftliche, wirtschaftswissenschaftliche, philosophische, psychologische und soziologische Grundlagen“. Mit dabei sind führende Experten der Sozialen Robotik, der Robotik, der Künstlichen Intelligenz, der Soziologie, der Psychologie und der Philosophie. Sie lehren und forschen an Hochschulen in der Schweiz, in Deutschland, in Österreich, in Dänemark und in Schweden. Auch ein Hersteller ist vertreten, der über den Einsatz seines Produkts berichtet. Das Fachbuch ist Ende 2021 bei Springer Gabler erschienen und kann über link.springer.com/book/10.1007/978-3-658-31114-8 heruntergeladen oder bestellt werden. Zudem ist es in jeder Buchhandlung verfügbar.
Abb.: Eiliko von Energize Lab (Foto: Energize Lab)
Unter dem Titel „KI trifft Autismus“ veranstaltet autismus schweiz am 30. Mai 2026 eine Fachtagung, die sich der Rolle künstlicher Intelligenz in der Gesellschaft und im Kontext von Autismus widmet. Im Fokus stehen aktuelle Entwicklungen aus KI und Robotik sowie deren Einfluss auf Alltag, Forschung und Lebensrealitäten, verbunden mit einer Einordnung der Chancen und Herausforderungen dieser Technologien. Fachliche Impulse liefern Matthias Schüssler, Dr. Maya Schneebeli, Prof. Dr. André Frank Zimpel, Dr. Christa Schmid Meier und Prof. Dr. Oliver Bendel. Das detaillierte Programm ist in der offiziellen Ausschreibung veröffentlicht. Die Teilnahme ist sowohl vor Ort als Live-Anlass im großen Hörsaal Nord des Universitätsspitals Zürich als auch zeitversetzt über eine On-Demand-Version möglich. Während der Live-Veranstaltung werden die Referate aus dem Hauptraum zusätzlich in einen Nebenraum übertragen, der speziell für Personen im Autismus-Spektrum vorgesehen ist. Die Aufzeichnung steht etwa zehn Tage nach dem Anlass bis Ende Juli 2026 über das Veranstaltungsportal zur Verfügung. Weitere Informationen sind über portal.autismus.ch/veranstaltungen/202 abrufbar.