The paper „Reading Between the Laughs: A Human-Referenced Audio Evaluation of MLLMs for Social Robotics“ by Sahan Hatemo, Katharina Kühne, and Oliver Bendel has been accepted at ICSR + Art 2026. In this work, the researchers investigated whether today’s leading AI models can distinguish authentic from non-authentic laughter based solely on audio signals. The results revealed striking differences in model behavior: OpenAI systems showed a strong tendency to interpret most laughter as genuine, while Gemini models were generally more skeptical. Despite these contrasting biases, several models performed significantly better than chance, with Gemini 2.5 Pro achieving the strongest overall results. Their analysis also demonstrated that less capable models often relied on superficial cues such as pitch, disproportionately labeling higher-pitched laughter as less authentic, whereas the top-performing model appeared to focus on more sophisticated voice quality features, suggesting a deeper understanding of laughter authenticity. These findings highlight the growing potential of multimodal large language models in social robotics, where accurately interpreting subtle social signals like laughter could play an important role in trust, communication, and relationship building between humans and robots. The 18th International Conference on Social Robotics will take place in London, UK, from 1-4 July 2026. ICSR is the leading international forum that brings together researchers, academics, and industry professionals from across disciplines to advance the field of social robotics.
The paper „Small Talk with a Robot Reduces Stress and Improves Mood“ by Katharina Kühne, Antonia L. Z. Klöffel, Oliver Bendel, and Martin H. Fischer has been accepted for presentation at the ICSR 2025, which will take place in Naples from September 10 to 12, 2025. Previous research has shown that social support reduces stress and improves mood. This study tested whether small talk with a social robot could be helpful. After performing a stressful task, 98 participants either chatted with a NAO robot, listened to the robot tell a neutral story, or did not interact with the robot. Both robot interactions reduced stress, particularly small talk, which also boosted positive mood. The effects were stronger in those with high acute stress. Positive affect played a key role in stress reduction, suggesting that robot-mediated small talk may be a useful tool for providing emotional support. Dr. Katharina Kühne and Prof. Dr. Martin H. Fischer are researchers at the University of Potsdam. Antonia L. Z. Klöffel assists Katharina Kühne as a junior scientist. Martin Fischer is the head of the Potsdam Embodied Cognition Group (PECoG). Prof. Dr. Oliver Bendel is a PECoG associated researcher. Further information about the conference is available at icsr2025.eu.
The paper „Robots at arm’s length: Unveiling the dynamics of interpersonal distance preferences in human-robot interactions“ by Katharina Kühne, Laura M. Zimmer, Melina Jeglinski-Mende, Oliver Bendel, Yuefang Zhou, and Martin H. Fischer was published in February 2025 in the proceedings volume „Social Robots with AI: Prospects, Risks, and Responsible Methods“ … From the abstract: „In social interactions, interpersonal distance is a vital factor influencing relationships, providing protection, and regulating arousal. Despite the intuitive nature of adopting specific distances, little is known about comfortable interpersonal distances with social robots. In our online study with 66 participants using a Go/No-Go task, we investigated perceptions of individuals standing face-to-face with a robot at different distances. In line with the negativity bias hypothesis, participants exhibited a preference for greater distances, as reflected in longer reaction times. Furthermore, the human-likeness of the robots moderated the link between distance and arousal. Finally, the most human-like robot was less liked and evoked higher arousal. These findings have implications for designing social robots and optimizing interactions, particularly in educational or medical contexts.“ The proceedings volume comprises the papers presented at Robophilosophy 2024 in Aarhus. Leading philosophers, computer scientists, and roboticists met there in August. Like the ICSR, the conference is one of the world’s leading conferences on social robotics.
Fig.: What is the right distance to a robot? (Bild: DALL-E 3)
The uncanny valley effect is a famous hypothesis. Whether it can be influenced by context is still unclear. In an online experiment, Katharina Kühne and her co-authors Oliver Bendel, Yuefang Zue and Martin Fischer found a negative linear relationship between a robot’s human likeness and its likeability and trustworthiness, and a positive linear relationship between a robot’s human likeness and its uncaniness. „Social context priming improved overall likability and trust of robots but did not modulate the Uncanny Valley effect.“ (Abstract) Katharina Kühne outlined these conclusions in her presentation „Social, but Still Uncanny“ – the title of the paper – at the International Conference on Social Robotics 2024 in Odense, Denmark. Like Yuefang Zue and Martin Fischer, she is a researcher at the University of Potsdam. Oliver Bendel teaches and researches at the FHNW School of Business. Together with Tamara Siegmann, he presented a second paper at the ICSR.
Im privat finanzierten Social Robots Lab von Prof. Dr. Oliver Bendel ist seit Dezember 2023 der Unitree Go2 zu finden. Er hört auf den Namen Bao (chin. für „Juwel“ oder „Schatz“). Heise schreibt in einem Artikel: „Das Basismodell des Go2 ist am Kopf mit einem Lidar ausgestattet, das ein halbkugelförmiges Sichtfeld mit 90 vertikal und 360 Grad horizontal besitzt. Die Mindestreichweite des Lidar beträgt etwa 5 cm. Damit kann der Roboter im Gelände selbstständig navigieren, Hindernisse erkennen und sie auch umgehen. Der Roboter läuft mit einer Geschwindigkeit von bis zu 2,5 m/s und zeigt sich dabei äußerst agil. … Mit an Bord ist auch eine 2-Megapixel-Kamera, mit der Schnappschüsse und Videos aufgenommen werden können.“ (Heise News, 27. Juli 2023) Ein Anliegen des Wirtschaftsinformatikers und Technikphilosophen ist, bei der Tier-Maschine-Interaktion (Animal-Machine Interaction) voranzuschreiten. Dieses Arbeitsgebiet wurde von ihm im Jahre 2013 in seinem Beitrag „Considerations about the Relationship between Animal and Machine Ethics“ definiert, in Anlehnung an den Begriff der Animal-Computer Interaction, deren Pionierin Clara Mancini ist. Seit dieser Zeit entwickelte er mehrere Artefakte und Konzepte in diesem Bereich, darunter Robocar (Modellierung für tierfreundliche Autos), LADYBIRD (Prototyp eines insektenfreundlichen Staubsaugerroboters), HAPPY HEDGEHOG (Prototyp eines igelfreundlichen Staubsaugerroboters) und ANIFACE (Konzept für ein System mit Gesichtserkennung zur Identifizierung von Braunbären). Mit Bao sollen Reaktionen von Haus-, Nutz- und Wildtieren getestet werden. Ziel ist es, Roboter nicht nur menschen-, sondern auch tierfreundlich zu gestalten.
Wie verschiedene Medien melden, hat SoftBank die Produktion von Pepper im letzten Jahr eingestellt und wird sie vorerst nicht wieder aufnehmen – es sei denn, es würde sich eine erhöhte Nachfrage einstellen. Die angeblich geringe Nachfrage war der Grund für den japanischen Konzern, sich von dem wohl bekanntesten sozialen Roboter – der oft auch als Serviceroboter fungiert – zu verabschieden. Insgesamt wurden laut Heise ca. 27.000 Exemplare hergestellt. Das ist für einen Roboter in dieser Größe, mit dieser Ausstattung und in dieser Preislage nicht wenig. In den Millionenbereich kam Cozmo, der allerdings klein und günstig war – der Hersteller Anki ging in Konkurs, der „Nachfolger“ Digital Dream Labs (die Eigentümer hatten sich die Rechte gesichert) konnte den von WALL-E und EVE inspirierten Publikumsliebling bis zum heutigen Zeitpunkt trotz vieler Ankündigungen nicht wiederbeleben. Mit Pepper fehlt die Referenz schlechthin für die Soziale Robotik – was auch positive Effekte haben mag, insofern andere Modelle leichter die Aufmerksamkeit gewinnen und überhaupt in den Markt gebracht werden könnten.
With Hugvie and Somnox Sleep Robot, researchers and companies has made it clear that it is possible to build simple, soft social robots that have a certain utility and impact. This raises hopes for social robotics, which is currently showing some progress, but is still developing slowly. Materials such as rubber and plastic can be used to make simple, soft social robots. These materials can be combined with existing devices such as smartphones and tablets on which you run certain applications, or with simple sensors and electronic components. The project or thesis, announced by Oliver Bendel at the School of Business FHNW, will first do research on the basics of simple, soft social robots. The work of Hiroshi Ishiguro and Alexis Block (with Katherine J. Kuchenbecker) will be included. Then, examples of implementation forms are mentioned and sketched. Their purpose and benefits are presented, as well as possible areas of application. One example is to be implemented, whereby speech abilities and sounds can be an option as well as vibration and electrical impulses. The reference to applications in the household, in public space or in the commercial sector should be established. The project will start in March 2021.
The first phase of the HUGGIE project will start at the School of Business FHNW in March 2020. Oliver Bendel was able to recruit two students from the International Management program. The project idea is to create a social robot that contributes directly to a good life and economic success by touching and hugging people and especially customers. HUGGIE should be able to warm up in some places, and it should be possible to change the materials it is covered with. A research question will be: What are the possibilities besides warmth and softness? Are optical stimuli (also on displays), vibrations, noises, voices etc. important for a successful hug? HUGGIE could also play a role in crises and disasters, in epidemics and pandemics and in cases of permanent social distancing. Of course it would be bad if only a robot would hug us, and of course it would be good if humans could hug us every day if we wanted them to do so – but maybe in extreme situations a hug by a robot is better than nothing. The HUGGIE project is located in the heart of social robotics and on the periphery of machine ethics. By summer 2020, the students will conduct an online survey to find out the attitudes and expectations of the users.
Mit der Reihe „Mensch und Maschine – Maschinenmensch“, die am 23. Oktober 2014 in Basel startet, wollen die Veranstalter (Flying Science in Zusammenarbeit mit dem Institut für Wirtschaftsinformatik, Hochschule für Wirtschaft FHNW) zeigen, „wie interdisziplinär, spannend und aktuell die vermeintlich rein technischen Themen der angewandten Informatik sind“ (Website Flying Science). „Verschiedene Fachleute gehen der Frage nach, wie sich die Gesellschaft neuen Technologien anpasst und umgekehrt. Die Reihe ist auch eine Networking-Plattform für alle, die sich für Inputs an der Schnittstelle zwischen Technik und Kultur interessieren und sich austauschen möchten.“ (Website Flying Science) Lehrreich wird sicherlich der Vortrag von Dr. Andreas Cremonini (Universität Basel). Er spricht am 6. November 2014 über „Echte Menschen“. In den Wochen darauf treten Prof. Dr. Hania Siebenpfeiffer (Ernst-Moritz-Arndt-Universität Greifswald) und Dr. Dennis Plachta (Albert-Ludwigs-Universität Freiburg) vor das Publikum. Den Auftakt macht Prof. Dr. Rolf Dornberger, Hochschule für Wirtschaft FHNW. Er referiert als Wirtschaftsinformatiker über „Maschinen im Alltag“. Weitere Informationen über www.flyingscience.ch.
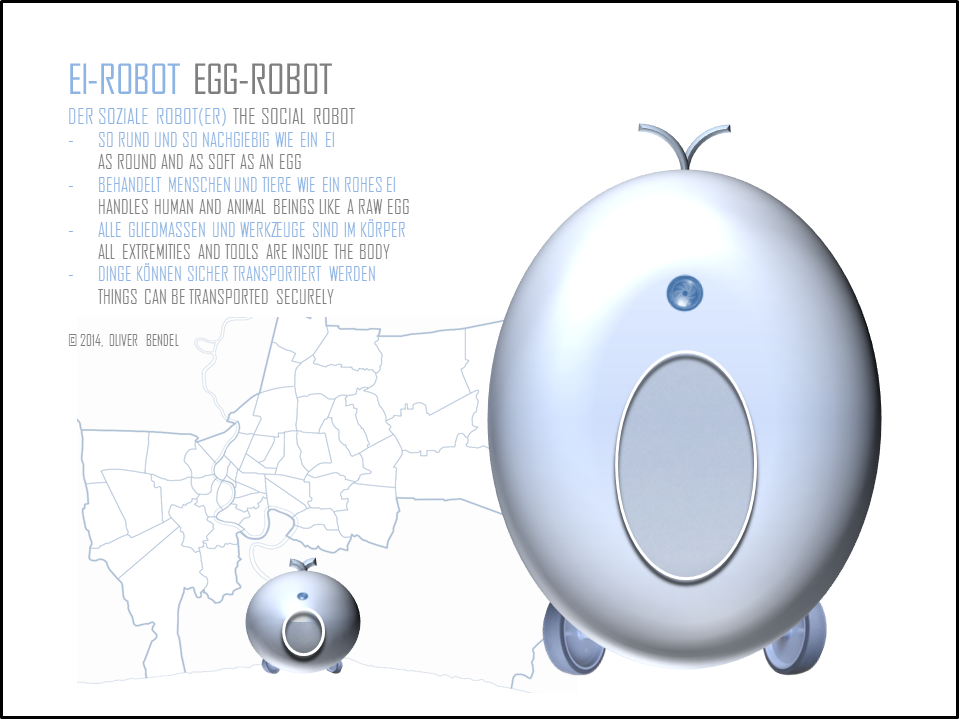
Der soziale Roboter ist eine relativ alte Idee. Einer der Pioniere in diesem Bereich ist William Grey Walter. In den letzten Jahren haben die Forschungen neuen Auftrieb erhalten. Man will und kann Roboter nicht mehr in hermetisch abgeschirmten Bereichen halten. Sie mischen sich unter die Menschen (und die Tiere) – und müssen sowohl sozial als auch (ein Thema der Maschinenethik und der Roboterethik im engeren Sinne) moralisch werden. Der EI-ROBOT ist eine Studie, die veranschaulichen soll, dass man Roboter rund und nachgiebig gestalten kann. Die Gliedmaßen und Werkzeuge verstecken sich im eiförmigen Körper und können bei Bedarf ausgefahren werden. Das Fortbewegungssystem ist nur angedeutet. Der EI-ROBOT könnte fahren, gehen oder fliegen. Im Körper werden Dinge aller Art transportiert, geschützt sowohl durch spezielle Gefäße als auch durch die Ummantelung selbst. Eine Besonderheit ist, dass der Körper sich anpassen und aus dem Ei eine Kugel werden kann. Die Form erinnert übrigens auch an das Ethik-Ei, das auf die engen Beziehungen zwischen den Bereichsethiken aufmerksam macht. Was die moralische Seite des Roboters angeht, müssen sich nicht zuletzt Informationsethik, Technikethik und Rechtsethik verständigen.