The elective module „Soziale Roboter aus technischer, wirtschaftlicher und ethischer Sicht“ („Social robots from a technical, economic, and ethical perspective“) by Prof. Dr. Oliver Bendel will be held again from February 12 to 14, 2026 at the FHNW in Brugg-Windisch. It is primarily aimed at aspiring business economists, but prospective information systems specialists can also take part. Dr. Amol Deshmukh has been invited again as a guest speaker. He will give a talk entitled „Improving Hand Hygiene in Schools with Socially Assistive Robots“. From his bio: „Dr Amol Deshmukh is a Marie Curie Postdoctoral Research Fellow at ETH Zurich, where his work sits at the intersection of social robotics, AI, and human behaviour. A pioneer in adapting human-robot interaction for global and low-resource contexts, his research has received international media coverage for its focus on real-world societal impact.“ In this talk, he will discuss his work leveraging social robots to promote hand hygiene in schools, examining the cultural and socio-economic implications of deploying such technology. Unitree Go2, Alpha Mini, Cozmo, Vector, AIBI, Furby, Booboo, and Hugvie from Oliver Bendel’s private Social Robots Lab will also be on site. At the end of the elective module, students design social robots – also with the help of generative AI – that they find useful, meaningful, or simply attractive. The elective modules have been offered since 2021 and are very popular.
From September to December 2025, Oliver Bendel published three articles on wearable social robots. The first was „That Robot Suits You Well!: On the Phenomenon of Wearable Social Robots“ – a technical article introducing the topic, which appeared in Wiley Industry News. This was followed by the full paper „Wearable Social Robots for the Disabled and Impaired“ and the short paper „Wearable Social Robots in Space“ (lead author Tamara Siegmann), which were presented at ICSR 2025 in Naples and published in the proceedings volume by Springer. One paper presents opportunities and risks for disabled and impaired people that arise, for example, from the connection with multimodal large language models. The other presents opportunities and risks for astronauts, for whom the small robots can be „contact persons“ and comforters. MLLMs are also relevant here. Oliver Bendel coined the term „wearable social robots“. His AIBI, together with Cozmo, Vector, Alpha Mini, Boo Boo, Unitree Go2 aka Bao, Hugvie, and other robots, forms his privately funded Social Robots Lab.
The article „Small Talk with a Robot Reduces Stress and Improves Mood“ by Katharina Kühne, Antonia L. Z. Klöffel, Oliver Bendel, and Martin H. Fischer was published on December 23, 2025. It is part of the volume „Social Robotics + AI: 17th International Conference, ICSR+AI 2025, Naples, Italy, September 10–12, 2025, Proceedings, Part III.“ From the abstract: „Research has demonstrated that social support is crucial in mitigating stress and enhancing mood. Not only do long-term, meaningful relationships contribute to well-being, but everyday social interactions, such as small talk, also offer psychological benefits. As social robots increasingly become more integrated into daily life, they present a potential avenue for stress interventions. In our online study, 98 participants underwent a stress induction using the Stroop task and were then assigned to one of three conditions: engaging in scripted small talk with a simulated NAO robot online, listening to a neutral story told by the same NAO robot, or no intervention (control condition). Results indicate that both interventions effectively reduced stress, with a tendency towards a stronger effect in the Small talk condition. Small talk not only helped maintain positive affect but also reduced negative affect. Notably, the benefits were more pronounced among individuals experiencing higher acute stress following the stress induction, but were less evident in those with chronically elevated stress levels. Furthermore, the effect of the intervention on stress reduction was mediated by changes in positive affect. These findings suggest that small talk with a social robot may serve as a promising tool for stress reduction and affect regulation.“ The first author, a researcher from the University of Potsdam, presented the paper on September 12, 2025, in Naples. It can be downloaded from link.springer.com/chapter/10.1007/978-981-95-2398-6_1.
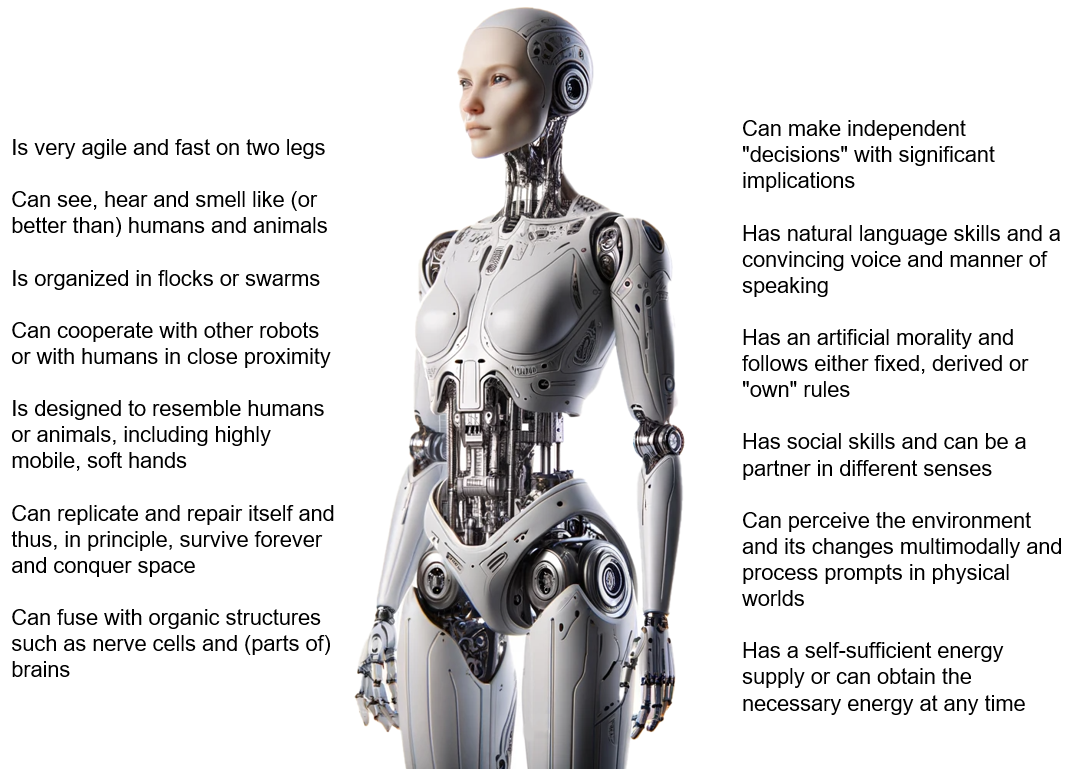
Fig.: A social robot (Photo: SoftyLomaco, Wikimedia, CC BY-SA 4.0)
The article „Wearable Social Robots in Space“ by Tamara Siegmann and Oliver Bendel was published on December 23, 2025. It is part of the volume „Social Robotics + AI: 17th International Conference, ICSR+AI 2025, Naples, Italy, September 10–12, 2025, Proceedings, Part I.“ From the abstract: „Social robots have been developed on Earth since the 1990s. This article shows that they can also provide added value in space – particularly on a manned flight to Mars. The focus in this paper is on wearable social robots, which seem to be an obvious type due to their small size and low weight. First, the environment and situation of the astronauts are described. Then, using AIBI as an example, it is shown how it fits into these conditions and requirements and what tasks it can perform. Possible further developments and improvements of a wearable social robot are also mentioned in this context. It becomes clear that a model like AIBI is well suited to accompany astronauts on a Mars flight. However, further developments and improvements in interaction and communication are desirable before application.“ The Swiss student presented the paper together with her professor on September 10, 2025, in Naples. It can be downloaded from link.springer.com/chapter/10.1007/978-981-95-2379-5_33.
Wearable Social Robots sind sehr kleine und zugleich äußerst leistungsfähige Systeme, die um den Hals, am Körper oder in einer Schulter- oder Handtasche getragen werden. Sie sind nicht nur Begleiter des Menschen, sondern werden ein Teil von ihm, indem sie seine Sinne und Ausdrucksmöglichkeiten erweitern. Der Artikel mit dem Titel „Dieser Roboter steht Ihnen aber gut!“ (Untertitel „Über das Phänomen der Wearable Social Robots“) von Oliver Bendel definiert den Begriff der Wearable Social Robots, stellt Anwendungsbereiche vor und erörtert soziale sowie ethische Herausforderungen. Zudem werden Empfehlungen für Entwickler und Benutzer gegeben. Es wird deutlich, dass Wearable Social Robots neuartige Werkzeuge sowie Erweiterungen oder Verbesserungen des Menschen darstellen, deren Möglichkeiten über jene von Apps auf Smartphones hinausgehen. Der Artikel ist am 25. September 2025 in Wiley Industry News erschienen, nicht nur in deutscher, sondern auch in englischer Sprache.
Abb.: AIBI mit Halskette von hinten (Foto: LivingAI)
The volume „Animals, Ethics, and Engineering: Intersections and Implications“, edited by Rosalyn W. Berne, was published on 7 August 2025. The authors include Clara Mancini, Fiona French, Abraham Gibson, Nic Carey, Kurt Reymers, and Oliver Bendel. The title of Oliver Bendel’s contribution is „An Investigation into the Encounter Between Social Robots and Animals“. The abstract reads: „Increasingly, social robots and certain service robots encounter, whether this is planned or not, domestic, farm, or wild animals. They react differently, some interested, some disinterested, some lethargic, some panicked. Research needs to turn more to animal-robot relationships, and to work with engineers to design these relationships in ways that promote animal welfare and reduce animal suffering. This chapter is about social robots that are designed for animals, but also those that – for different, rather unpredictable reasons – meet, interact, and communicate with animals. It also considers animal-friendly machines that have emerged in the context of machine ethics. In the discussion section, the author explores the question of which of the presented robots are to be understood as social robots and what their differences are in their purpose and in their relationship to animals. In addition, social and ethical aspects are addressed.“ The book was produced by Jenny Publishing and can be ordered via online stores.
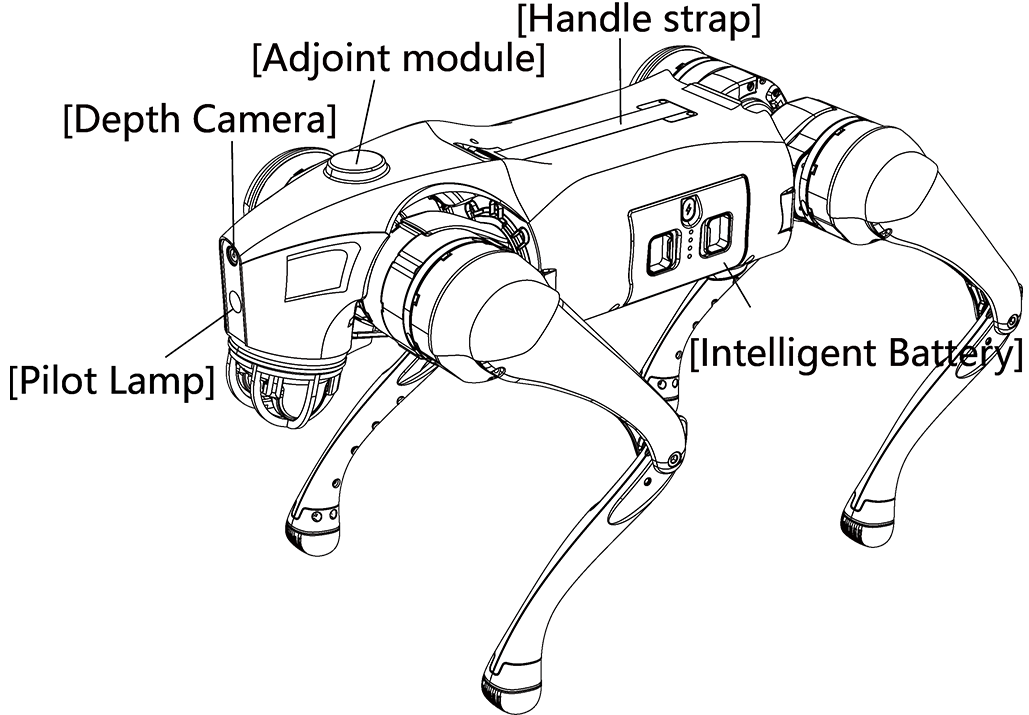
Animal-machine interaction (AMI) is a discipline or field of work that deals with the interaction between animals and machines. This is how Prof. Dr. Oliver Bendel explains it in the Gabler Wirtschaftslexikon. It is primarily concerned with the design, evaluation, and implementation of complex machines and computer systems with which animals interact and which in turn interact and communicate with animals. There are close links to animal-computer interaction (ACI). Increasingly, the machine is a robot that is either remote-controlled or (partially) autonomous. In „The Robodog Project“ (also known as „Bao Meets Pluto„), the encounters between robotic quadrupeds and small to medium-sized dogs are explored. The project collaborator is Selinar Rohr, who is writing her bachelor’s thesis in this context. The walking, running, and jumping Unitree Go2 from Oliver Bendel’s private Social Robots Lab is in its original state or is wearing a head made with a 3D printer provided by Norman Eskera. The project is being carried out at the FHNW School of Business and will end on August 12, 2025, after which the results will be presented to the community and, if possible, to the general public.
Shenzhen-based Maxvision Technology Corp. has acquired the core assets of French robotics pioneer Aldebaran, including its iconic humanoid robots NAO and Pepper. This was reported by The Robot Report in its article „Maxvision buys core robot assets of Aldebaran, including Nao and Pepper“ from July 19, 2025. The move follows Aldebaran’s bankruptcy and receivership earlier this year. The company, founded in 2005, became known for designing approachable humanoid robots for education, healthcare, retail, and research. Maxvision stated that the acquisition will bolster its R&D in emotional interaction and motion control, expand its product portfolio into humanoid robotics, and support global expansion – particularly in Europe and North America. According to The Robot Report, strategic sectors include eldercare, education, border security, and emergency services. To honor Aldebaran’s legacy, Maxvision plans to establish a French subsidiary, retaining local teams and investing in continued innovation, especially in education and healthcare applications.
The short paper „Wearable Social Robots in Space“ by Tamara Siegmann and Oliver Bendel (FHNW School of Business) has been accepted for presentation at the International Conference on Social Robotics (ICSR). The conference will take place from September 10 to 12, 2025, in Naples, Italy. Social robots have been explored on Earth since the 1990s, but this study considers their application beyond our planet – specifically, on manned missions to Mars. The focus lies on wearable social robots, a promising form factor due to their compact size and light weight. Using AIBI as a case study, the short paper examines how such a robot could support astronauts under the unique psychological and environmental conditions of deep space travel. The authors discuss the little robot’s potential roles and highlight directions for future development, particularly in improving human-robot interaction and communication. The findings suggest that wearable social robots like AIBI could offer valuable support on long-duration space missions.
The paper „The Universal Robot of the 21st Century“ by Oliver Bendel was published in February 2025 in the proceedings volume „Social Robots with AI: Prospects, Risks, and Responsible Methods“ … From the abstract: „Developments in several areas of computer science, robotics, and social robotics make it seem likely that a universal robot will be available in the foreseeable future. Large language models for communication, perception, and control play a central role in this. This article briefly outlines the developments in the various areas and uses them to create the overall image of the universal robot. It then discusses the associated challenges from an ethical and social science perspective. It can be said that the universal robot will bring with it new possibilities and will perhaps be one of the most powerful human tools in physical space. At the same time, numerous problems are foreseeable, individual, social, and ecological.“ The proceedings volume comprises the papers presented at Robophilosophy 2024 in Aarhus. Leading philosophers, computer scientists and roboticists met there in August. Like the ICSR, the conference is one of the world’s leading conferences on social robotics.
On October 22, 2024, Tamara Siegmann and Prof. Dr. Oliver Bendel (School of Business FHNW) presented their project „Robots in Prison“ at the ICSR in Odense (Denmark). They investigated whether collaborative and social robots can and should be used in prisons. One result was that modern industrial robots such as cobots and classic service robots such as transportation and cleaning robots hardly create any added value. Instead, they take work away from inmates. In contrast, social robots are conceivable and useful. They bring something to imprisonment that is common in freedom. And – an important point for resocialization – they can combat the loneliness of inmates. The International Conference on Social Robotics is the most important conference for social robotics alongside Robophilosophy. The paper „Social and Collaborative Robots in Prison“ will be published in a proceedings volume by Springer at the end of the year.
Der Uncanny-Valley-Effekt ist eine berühmte Hypothese. Es ist bis heute unklar, ob er vom Kontext beeinflusst werden kann. Katharina Kühne hat mit ihren Mitautoren Oliver Bendel, Yuefang Zue und Martin Fischer in einem Onlineexperiment eine negative lineare Beziehung zwischen der Menschenähnlichkeit eines Roboters und seiner Sympathie und Vertrauenswürdigkeit gefunden, zugleich eine positive lineare Beziehung zwischen der Menschenähnlichkeit eines Roboters und seiner Unheimlichkeit. „Social context priming improved overall likability and trust of robots but did not modulate the Uncanny Valley effect.“ (Abstract) Die Schlussfolgerungen wird Katharina Kühne in ihrer Präsentation „Social, but Still Uncanny“ – so auch der Titel des Papers – bei der International Conference on Social Robotics 2024 in Odense (Dänemark) ziehen. Die Doktorandin forscht wie Yuefang Zue und Martin Fischer (Erstbetreuer) an der Universität Potsdam. Oliver Bendel (Zweitbetreuer) lehrt und forscht an der Hochschule für Wirtschaft FHNW. Er ist zusammen mit Tamara Siegmann mit einem zweiten Paper bei der ICSR vertreten.
Tamara Siegmann and Prof. Dr. Oliver Bendel carried out the „Robots in Prison“ project in June and July 2024. The student, who is studying business administration at the FHNW School of Business, came up with the idea after taking an elective module on social robots with Oliver Bendel. In his paper „Love Dolls and Sex Robots in Unproven and Unexplored Fields of Application“, the philosopher of technology had already made a connection between robots and prisons, but had not systematically investigated this. They did this together with the help of expert interviews with the intercantonal commissioner for digitalization, several prison directors and employees as well as inmates. The result was the paper „Social and Collaborative Robots in Prison“, which was submitted to the ICSR 2024. The International Conference on Social Robotics is the most important conference for social robotics alongside Robophilosophy. The paper was accepted in September 2024 after a revision of the methods section, which was made more transparent and extensive and linked to a directory on GitHub. This year’s conference will take place in Odense (Denmark) from October 23 to 26. Last year it was held in Doha (Qatar) and the year before last in Florence (Italy).
The deadline for the International Conference on Social Robotics is approaching. Experts in social robotics and related fields have until July 5 to submit their papers. The prestigious event was last held in Florence (2022) and Qatar (2023). Now it enters its next round. The 16th edition will bring together researchers and practitioners working on human-robot interaction and the integration of social robots into our society. The title of the conference includes the addition „AI“. This is a clarification and demarcation that has to do with the fact that there will be two further formats with the name ICSR in 2024. ICSR’24 (ICSR + AI) will take place as a face-to-face conference in Odense, Denmark, from 23 to 26 October 2024. The theme of this year’s conference is „Empowering Humanity: The role of social and collaborative robotics in shaping our future“. The topics of the Call for Papers include „collaborative robots in service applications (in construction, agriculture, etc.)“, „Human-robot interaction and collaboration“, „Affective and cognitive sciences for socially interactive robots“, and „Context awareness, expectation, and intention understanding“. The general chairs are Oskar Palinko, University of Southern Denmark, and Leon Bodenhagen, University of Southern Denmark. More information is available at icsr2024.dk.
The manuscript of the book „Non-Human Animals, Ethics and Engineering“ (alternative title „Animals, Ethics and Engineering“) was sent to the publisher Jenny Stanford in May 2024. It contains 16 chapters on this topic, including by Clara Mancini („Animal-Centered Technology and Sustainable Development“), Fiona French („Designing and Crafting Systems for Non-Human Animals“), and Leonie Bossert together with Thilo Hagendorff („Animals and AI: The Role of Animals in AI Research and Application“). In “An Investigation into the Encounter Between Social Robots and Animals” (Chapter 12), Oliver Bendel “delves into the evolving landscape of social robots designed to interact with animals, dissecting the intricate dynamics of these interactions and their ethical ramifications” (Information from the editors). The philosopher of technology also presents his own projects, such as concepts and prototypes of animal-friendly machines, developed in the context of machine ethics, animal-machine interaction, and social robotics. The editor is Rosalyn W. Berne from the University of Virginia. The book is scheduled for publication in late summer or fall 2024.
Fig.: A robot turtle and a woman (Image: Ideogram)
The prestigious International Conference on Social Robotics was last held in Florence (2022) and Qatar (2023). Now it enters its next round. The 16th edition will bring together researchers and practitioners working on human-robot interaction and the integration of social robots into our society. The title of the conference includes the addition „AI“. This is a clarification and demarcation that has to do with the fact that there will be two further formats with the name ICSR in 2024. ICSR’24 (ICSR + AI) will take place as a face-to-face conference in Odense, Denmark, from 23 to 26 October 2024. ICSR’24 will take place as a face-to-face conference in Odense, Denmark, from 23 to 26 October 2024. The theme of this year’s conference is „Empowering Humanity: The role of social and collaborative robotics in shaping our future“. The topics of the Call for Papers include „collaborative robots in service applications (in construction, agriculture, etc.)“, „Human-robot interaction and collaboration“, „Affective and cognitive sciences for socially interactive robots“, and „Context awareness, expectation, and intention understanding“. The general chairs are Oskar Palinko, University of Southern Denmark, and Leon Bodenhagen, University of Southern Denmark. More information is available at icsr2024.dk.