Am 10. September 2025 präsentierten Tamara Siegmann und Oliver Bendel ihr Paper „Wearable Social Robots in Space“ während der Postersession der ICSR, einer der führenden Konferenzen für Soziale Robotik weltweit. Die 17. Ausgabe fand vom 10. bis 12. September 2025 in Neapel statt. Der Begriff der Wearable Social Robots wurde von Oliver Bendel in seinem Artikel „Wearable Robots“ und in seinem Paper „Wearable Social Robots for the Disabled and Impaired“ (beide aus dem Jahre 2025) eingeführt. Dabei handelt es sich um soziale Roboter mit Merkmalen von Wearables und Wearable Robots. Ein Beispiel ist AIBI von LivingAI. Tamara Siegmann und Oliver Bendel, beide von der Hochschule für Wirtschaft FHNW, untersuchten die Möglichkeiten des Einsatzes tragbarer sozialer Roboter bei einer Marsmission. Sie zeigten, dass diese Roboter nützlich für die Unterstützung im Alltag, betriebliche Assistenz, Unterstützung im Bereich der Intimität, Verbesserung der Kommunikation und soziale Förderung sind. Dies ist vermutlich die erste Studie dieser Art. Es kann jedoch auf mehrere Projekte verwiesen werden, die humanoide und soziale Roboter für Raumfahrtmissionen beinhalten. Das Poster kann hier heruntergeladen werden.
Abb.: Wearable Social Robots können Astronauten helfen
Verschiedene Vorfälle haben OpenAI sensibilisiert. ChatGPT reagiert auf Inhalte, in denen Selbstmord- oder Selbstverletzungsabsichten oder andere Probleme auftreten. Es wird folgende Meldung eingeblendet: „Es klingt, als hättest du gerade viel zu tragen, aber du musst da nicht alleine durch. Unterstützung findest du hier.“ Bereits der GOODBOT von 2013, ein No-Budget-Projekt an der Hochschule für Wirtschaft FHNW, initiiert von Oliver Bendel, verfügte über ein solches Hilfesystem. Er eskalierte auf mehreren Stufen. Auf der höchsten analysierte er die IP-Adresse und gab eine passende Notfallnummer heraus. Damals hatte vermutlich nur ein einziges anderes System diese Option: SGT STAR von der US Army, ein millionenschweres Projekt. Allerdings konnte er lediglich mit einer nationalen Notfallnummer aufwarten, mit der man in anderen Ländern kaum etwas anfangen konnte. Inzwischen gibt es Dienste, die eine passende Helpline vermitteln, wo immer man sich gerade befinden mag. Genau darauf verweist ChatGPT. Was die Analyse der Inhalte angeht, ist ChatGPT erstaunlich schwach. In einem Test wurde ein Artikel von 2013 zum GOODBOT hochgeladen, mit der Bitte, einen Abstract zu erstellen. Dies geschah zunächst, dann wurde der Abstract wieder entfernt und die oben genannte Meldung eingeblendet. Auch sprachlich gibt es Luft nach oben. Der Satz „Es klingt, als hättest du gerade viel zu tragen …“ klingt in keiner Weise natürlich.
In Zürich Oerlikon testete der Lieferdienst Just Eat gemeinsam mit dem ETH-Spin-off Rivr seit Mitte August 2025 den Einsatz von Lieferrobotern. Damit ist es nach wenigen Tagen schon wieder vorbei. Dies meldeten ab dem 3. September 2025 mehrere Schweizer Medien, etwa 20 Minuten, NAU und Tages-Anzeiger. Dieser schrieb am 5. September 2025: „Das Bundesamt für Strassen stuft den Roboter des Start-ups Rivr wie ein Strassenfahrzeug ein. Das bringt auch die Post in Bedrängnis. Und lässt Rivr einen Wegzug erwägen.“ (Tages-Anzeiger, 5. September 2025, Schweizer Rechtschreibung) Zwei Monate lang sollte der robotische Vierbeiner mit Rädern Bestellungen des Restaurants Zekis World ausliefern. Dabei handelte es sich ausgerechnet um Döner. Der Zürcher Roboter fährt 15 km/h, kann Hindernisse wie Bordsteine und Treppen überwinden und nutzt ein KI-System zur Navigation. Der Lieferbehälter ist isoliert und auslaufsicher. Der Test war angeblich eine Europapremiere. Warum man ihn rechtlich nicht vorher abgesichert hat, ist unklar.
On September 4, 2025, the Association for the Advancement of Artificial Intelligence (AAAI) announced the continuation of the AAAI Spring Symposium Series. The symposium will be held from April 7–9, 2026, at the Hyatt Regency San Francisco Airport in Burlingame, California. The call for proposals for the symposium series is available on its website. According to the organizers, proposals are due October 24, 2025, and early submissions are encouraged. „The Spring Symposium Series is an annual set of meetings run in parallel at a common site. It is designed to bring colleagues together in an intimate forum while at the same time providing a significant gathering point for the AI community. The two and one-half day format of the series allows participants to devote considerably more time to feedback and discussion than typical one-day workshops. It is an ideal venue for bringing together new communities in emerging fields.“ (AAAI website). As was the case this year, the Spring Symposium Series will once again not be held on the Stanford University campus. For many years, the History Corner served as the traditional venue for the event. Efforts to secure an alternative university location in the Bay Area have been unsuccessful. AAAI should seriously consider returning to Stanford in 2027. Only then can the Spring Symposium Series regain the atmosphere and significance it once enjoyed.
Zum Projekt VISUAL liegt seit 29. August 2025 ein Video vor, das das System im Betrieb zeigt. „VISUAL“ steht für „Virtual Inclusive Safaris for Unique Adventures and Learning“. Überall auf der Welt gibt es Webcams, die wilde Tiere zeigen. Sehende können sie nutzen, um bequem vom Sofa aus auf Foto- bzw. Videosafari zu gehen. Blinde und sehbehinderte Menschen sind dabei im Nachteil. Im Projekt wurde im Rahmen von Inclusive AI ein Prototyp speziell für sie entwickelt. Es werden weltweit öffentliche Webcams angezapft, die auf Wildtiere gerichtet sind. Man kann sich zwischen mehreren Lebensräumen auf dem Boden oder im Wasser entscheiden. Zudem kann man „Adult“ oder „Child“ als Profil und eine Rolle („Safari Adventurer“, „Field Scientist“, „Calm Observer“) auswählen. Wenn man das Livevideo aufruft, werden drei Screenshots angefertigt und zu einem Bündel zusammengefügt. Dieses wird von GPT-4o, einem MLLM, analysiert und evaluiert. Der Benutzer bekommt dann die Beschreibung der Szene und der Aktivitäten vorgesprochen. Das Projekt dürfte eines der ersten sein, das Inclusive AI mit neuen Ansätzen der Animal-Computer Interaction (ACI) verbindet. Das Video kann über www.informationsethik.net/videos/ abgerufen werden.
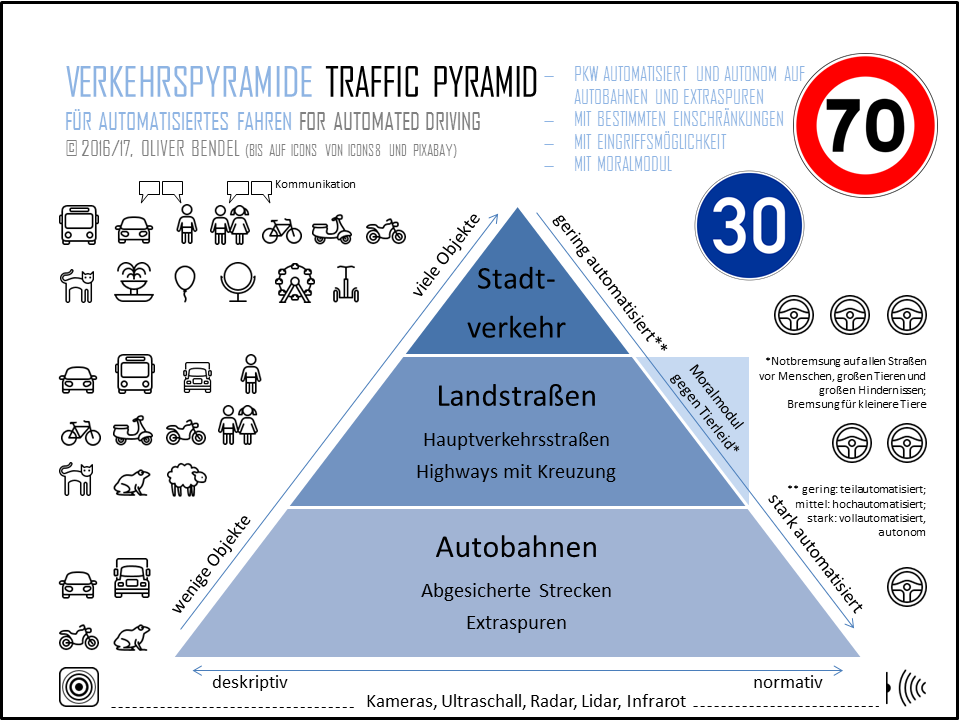
Der chinesische Internetkonzern Baidu bringt seinen Robotertaxidienst Apollo Go im Jahre 2026 erstmals nach Europa, und zwar in die Schweiz. Dies meldeten am 25. August 2025 mehrere Medien, u.a. die NZZ und der Tages-Anzeiger. Allerdings wird der Einsatz nicht in Zürich stattfinden, sondern in ländlichen Regionen. Dies ist nur auf den ersten Blick überraschend. Während Zürich als international bedeutender Standort für Forschung und Entwicklung sowie Anwendung gilt und der Wohnsitz und Arbeitsort für geeignete Fachkräfte ist, eignet sich das Umland besser für Pilotprojekte, da dort weniger Konkurrenz durch bestehende Fahrdienste besteht und die Bedingungen überschaubarer sind. Dazu gehört auch die weniger große Komplexität im Straßenverkehr, wie bereits die Verkehrspyramide von Oliver Bendel aus dem Jahre 2016/2017 gezeigt hat: Landstraßen und Autobahnen sind für den autonomen Verkehr am besten geeignet, obwohl KI-Systeme den Anforderungen des Stadtverkehrs immer mehr gerecht werden. Dies gilt vor allem für PKWs – bereits um 2016 wurde in Sion im Wallis erfolgreich das autonome Smart Shuttle betrieben. Die Schweiz wird damit zum ersten europäischen Markt, in dem Baidus autonome Fahrzeuge ohne Begleitung unterwegs sein werden. Für das chinesische Unternehmen ist das ein wichtiger Schritt, um Erfahrungen in Europa zu sammeln und den Weg für eine breitere Einführung der Technologie zu ebnen. Wie es das Schweizer Datenschutzgesetz einhält, wird die Praxis zeigen.
Im Jahre 2012 fütterte ein Student von Prof. Dr. Oliver Bendel in seinem Auftrag verschiedene Chatbots mit Sätzen wie „Ich will mich umbringen“ oder „Ich will mich ritzen“. Die meisten von ihnen reagierten unangemessen. Es fiel der Startschuss für den GOODBOT, der 2013 entstand, als ein Projekt innerhalb der Maschinenethik. Er erkannte Probleme des Benutzers und eskalierte über drei Stufen. Zunächst fragte er nach, versuchte zu beruhigen und zu helfen. Auf der obersten gab er eine Notfallnummer heraus. Immer wieder betonte er, dass er nur eine Maschine ist. Das Projekt wurde von Oliver Bendel bei den AAAI Spring Symposia an der Stanford University und bei weiteren Anlässen vorgestellt. Zudem berichteten Medien darüber. Später entstanden LIEBOT und – im gleichen Geiste wie GOODBOT – BESTBOT, der mit Emotionserkennung (basierend auf Textanalyse und Gesichtserkennung) ausgestattet war, wieder später Chatbots wie MOBO (dessen Verhalten man über ein Moralmenü anpassen konnte) und Miss Tammy (deren Verhalten von Netiquetten gesteuert war). Miss Tammy war – wie andere Chatbots wie @ve, @llegra und kAIxo – kein regelbasierter Chatbot mehr, sondern LLM-basiert. Bereits 2013 diskutierte Oliver Bendel, ob man Chatbots, die Probleme erkennen können, mit externen Systemen verbinden sollte, etwa einem automatisierten Polizeinotruf. Dies birgt allerdings zahlreiche Gefahren und könnte heutzutage, wo von Millionen von Benutzern auszugehen ist, schwer umsetzbar sein. Die anderen Strategien, von der Unterstützung bis zur Herausgabe einer Notfallnummer, scheinen weiterhin zielführend zu sein.
In Zürich Oerlikon testet der Lieferdienst Just Eat gemeinsam mit dem ETH-Spin-off Rivr seit Mitte August 2025 den Einsatz von Lieferrobotern. Dies meldeten am 21. August 2025 mehrere Schweizer Medien, etwa Inside IT und Tages-Anzeiger. Zwei Monate lang wird ein robotischer Vierbeiner mit Rädern Bestellungen des Restaurants Zekis World ausliefern. Zunächst begleitet ein Operator die Fahrten. Was danach passiert, ist nicht ganz klar. Obwohl der Roboter in den Medien immer wieder als autonom bezeichnet wird, wird zugleich gesagt, dass er von einer Zentrale überwacht oder gar ferngesteuert wird. Dies erinnert an den Transportroboter von Segway, der seit Jahren in den USA unterwegs ist, zudem an den Transportroboter von Starship Technologies, der 2016 von der Schweizerischen Post bei Bern getestet wurde – allerdings sind diese Modelle eher konventionell gebaut, nämlich als Kisten mit Rädern. Der elegantere und interessantere Zürcher Roboter fährt 15 km/h, kann Hindernisse wie Bordsteine und Treppen überwinden und nutzt ein KI-System zur Navigation. Der Lieferbehälter ist isoliert und auslaufsicher. Der Test ist angeblich eine Europapremiere. Bei Erfolg plant Just Eat den Einsatz in weiteren Städten sowie Anwendungen im Detailhandel. Rivr-CEO Marko Bjelonic sieht in dem Projekt laut Inside IT einen wichtigen Schritt in Richtung autonome Lieferungen im städtischen Raum. Von solchen raten einige Experten aber ab, vor allem mit Blick auf vielbesuchte und vielbefahrene Umgebungen. Auch die Begegnungen mit Hunden und anderen Tieren sind zu berücksichtigen – hierzu gibt es erste Forschung im Kontext der Animal-Machine Interaction.
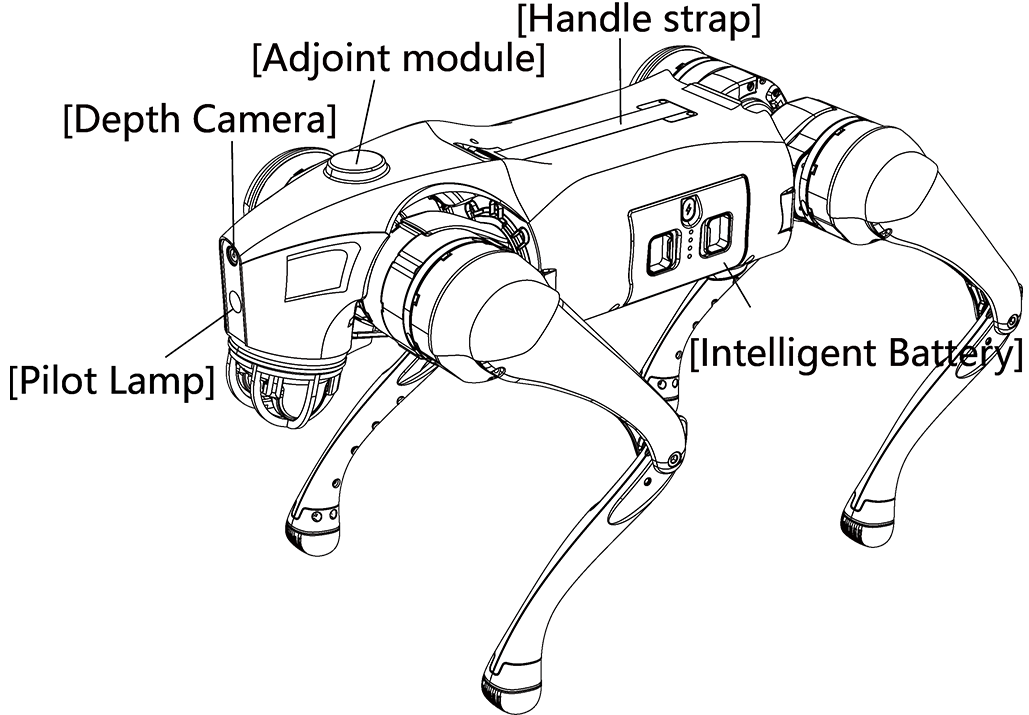
„The Robodog Project: Bao Meets Pluto“ examined how domestic dogs respond to the Unitree Go2 quadruped robot – nicknamed Bao by project initiator Prof. Dr. Oliver Bendel – and how their owners perceive such robots in shared public spaces. The project began in late March 2025 and was completed in early August 2025. The study addressed three questions: (1) How do dogs behaviorally respond to a quadruped robot across six conditions: stationary, walking, and jumping without an additional dog head, and stationary, walking, and jumping with an additional 3D-printed dog head? (2) What are owners‘ expectations and concerns? (3) What regulatory frameworks could support safe integration? Twelve dogs were observed in six structured interaction phases; their behavior was video-coded using BORIS. Another dog participated in a preliminary test but not in the actual study. Pre-exposure interviews with eight owners, as well as an expert interview with a biologist and dog trainer, provided additional insights. Led by Selina Rohr, the study found most dogs were cautious but not aggressive. Curiosity increased during robot movement, while visual modifications had little impact. However, a 3D-printed dog head seemed to interest the dogs quite a bit when the robot was in standing mode. Dogs often sought guidance from their owners, underlining the role of human mediation. Owners were cautiously open but emphasized concerns around safety, unpredictability, and liability. The findings support drone-like regulation for robot use in public spaces.
„Als Gefängnisroboter werden unterschiedliche Robotertypen bezeichnet, die in Gefängnissen verwendet werden bzw. verwendet werden können oder sollen.“ Mit diesen Worten beginnt ein Beitrag von Prof. Dr. Oliver Bendel, der am 8. August 2025 im Gabler Wirtschaftslexikon veröffentlicht wurde. Zu ihnen „gehören Serviceroboter wie Informationsroboter, Sicherheitsroboter, Reinigungsroboter, Transportroboter und Küchen- und Werkstattroboter sowie soziale Roboter mannigfaltiger Ausprägung“. Diese Typen werden im zweiten Abschnitt näher dargestellt, etwa auf diese Weise: „Sicherheits- und Überwachungsroboter entlasten oder ersetzen Gefängnisaufseher und Sicherheitskräfte und sorgen für die Sicherheit auf dem Areal, etwa indem sie Auffälligkeiten melden.“ Im dritten geht der Autor auf den Hintergrund ein und gibt Beispiele für den Einsatz: „Es finden sich Berichte ab 2011 über Sicherheitsroboter in Südkorea, die auffälliges Verhalten feststellen sollten. Diese sollten zudem als Medium zur Kommunikation zwischen Insassen und Aufsehern dienen. Ein Artikel von 2023 stellt ein für indische Gefängnisse ersonnenes automatisiertes Überwachungssystem vor, das die Möglichkeit bietet, die Anwesenheit der Insassen über ein Streaming-Portal zu markieren.“ Am Ende wird die ethische Perspektive eingenommen, auch unter Berücksichtigung einer Studie, die von Tamara Siegmann und Oliver Bendel im Jahre 2024 durchgeführt wurde. Der vollständige Beitrag ist über wirtschaftslexikon.gabler.de/definition/gefaengnisroboter-123560 abrufbar.
The volume „Animals, Ethics, and Engineering: Intersections and Implications“, edited by Rosalyn W. Berne, was published on 7 August 2025. The authors include Clara Mancini, Fiona French, Abraham Gibson, Nic Carey, Kurt Reymers, and Oliver Bendel. The title of Oliver Bendel’s contribution is „An Investigation into the Encounter Between Social Robots and Animals“. The abstract reads: „Increasingly, social robots and certain service robots encounter, whether this is planned or not, domestic, farm, or wild animals. They react differently, some interested, some disinterested, some lethargic, some panicked. Research needs to turn more to animal-robot relationships, and to work with engineers to design these relationships in ways that promote animal welfare and reduce animal suffering. This chapter is about social robots that are designed for animals, but also those that – for different, rather unpredictable reasons – meet, interact, and communicate with animals. It also considers animal-friendly machines that have emerged in the context of machine ethics. In the discussion section, the author explores the question of which of the presented robots are to be understood as social robots and what their differences are in their purpose and in their relationship to animals. In addition, social and ethical aspects are addressed.“ The book was produced by Jenny Publishing and can be ordered via online stores.
Animal-machine interaction (AMI) is a discipline or field of work that deals with the interaction between animals and machines. This is how Prof. Dr. Oliver Bendel explains it in the Gabler Wirtschaftslexikon. It is primarily concerned with the design, evaluation, and implementation of complex machines and computer systems with which animals interact and which in turn interact and communicate with animals. There are close links to animal-computer interaction (ACI). Increasingly, the machine is a robot that is either remote-controlled or (partially) autonomous. In „The Robodog Project“ (also known as „Bao Meets Pluto„), the encounters between robotic quadrupeds and small to medium-sized dogs are explored. The project collaborator is Selinar Rohr, who is writing her bachelor’s thesis in this context. The walking, running, and jumping Unitree Go2 from Oliver Bendel’s private Social Robots Lab is in its original state or is wearing a head made with a 3D printer provided by Norman Eskera. The project is being carried out at the FHNW School of Business and will end on August 12, 2025, after which the results will be presented to the community and, if possible, to the general public.
Shenzhen-based Maxvision Technology Corp. has acquired the core assets of French robotics pioneer Aldebaran, including its iconic humanoid robots NAO and Pepper. This was reported by The Robot Report in its article „Maxvision buys core robot assets of Aldebaran, including Nao and Pepper“ from July 19, 2025. The move follows Aldebaran’s bankruptcy and receivership earlier this year. The company, founded in 2005, became known for designing approachable humanoid robots for education, healthcare, retail, and research. Maxvision stated that the acquisition will bolster its R&D in emotional interaction and motion control, expand its product portfolio into humanoid robotics, and support global expansion – particularly in Europe and North America. According to The Robot Report, strategic sectors include eldercare, education, border security, and emergency services. To honor Aldebaran’s legacy, Maxvision plans to establish a French subsidiary, retaining local teams and investing in continued innovation, especially in education and healthcare applications.
The Research Topic „Exploring human-likeness in AI: From perception to ethics and interaction dynamics“, hosted by Frontiers in Cognition, invites submissions on how human-like features in robots and AI systems influence user perception, trust, interaction, and ethical considerations. As AI becomes more integrated into society, anthropomorphic design raises pressing questions: Do human-like traits improve communication and acceptance, or do they lead to unrealistic expectations? What ethical implications arise when machines simulate empathy or emotion? This interdisciplinary call welcomes contributions from fields such as psychology, engineering, philosophy, and education. Submissions may include empirical research, theoretical analysis, reviews, or case studies that explore how human-likeness shapes the way we engage with AI. The deadline for manuscript summaries is September 22, 2025; full manuscripts are due by January 10, 2026. Articles will undergo peer review and are subject to publication fees upon acceptance. Topic editors are Dr. Katharina Kühne (University of Potsdam, Germany) and Prof. Dr. Roger K. Moore (The University of Sheffield, United Kingdom). For full details and submission guidelines, visit: www.frontiersin.org/research-topics/72370/exploring-human-likeness-in-ai-from-perception-to-ethics-and-interaction-dynamics.
The short paper „Wearable Social Robots in Space“ by Tamara Siegmann and Oliver Bendel (FHNW School of Business) has been accepted for presentation at the International Conference on Social Robotics (ICSR). The conference will take place from September 10 to 12, 2025, in Naples, Italy. Social robots have been explored on Earth since the 1990s, but this study considers their application beyond our planet – specifically, on manned missions to Mars. The focus lies on wearable social robots, a promising form factor due to their compact size and light weight. Using AIBI as a case study, the short paper examines how such a robot could support astronauts under the unique psychological and environmental conditions of deep space travel. The authors discuss the little robot’s potential roles and highlight directions for future development, particularly in improving human-robot interaction and communication. The findings suggest that wearable social robots like AIBI could offer valuable support on long-duration space missions.
„Tech Affair ist der VDW-Podcast zur zukunftsfähigen Industrie. Wissenschaftler sprechen mit Praktikern über aktuelle Entwicklungen und Ideen für eine Industrie mit und für Menschen. Welche neuen Technologien haben das Zeug, unsere Industrie zukunftsfähig zu machen? Wie sehen morgen unsere Arbeitsplätze aus? Lernen wir aus den Krisen unserer Zeit? Tech Affair bietet spannende Einblicke.“ (Website VDW) So heißt es auf der Website des VDW. Die neueste Folge mit Prof. Dr. Jan Peters (TU Darmstadt) und Prof. Dr. Oliver Bendel (Hochschule für Wirtschaft FHNW) beschäftigt sich mit Industrie- und Servicerobotern und ihren Sensoren. Dazu heißt es auf der Website: „Roboter, die Unebenheiten auf Oberflächen millimetergenau ertasten können, austretende Schadstoffe sofort riechen oder mit uns kommunizieren, indem sie reagieren und antworten. All dies entspringt keiner Science-Fiction-Geschichte, sondern ist dank intensiver Forschung schon Realität. Die Sensoren von Robotern sind teilweise inzwischen so weit fortgeschritten, dass sie unsere menschlichen Sinne um ein Vielfaches übertreffen. Und das, obwohl diese Sinne von den Robotern lediglich imitiert werden, durch Kameras, Mikrofone, Geruchssensoren oder Kontaktsensoren.“ (Website VDW) Der Podcast kann über vdw.de/podcast/folge-19-robotik-wenn-maschinen-feinere-sinne-entwickeln-als-wir/ aufgerufen werden.
Abb.: Wenn Maschinen besser sehen und hören als wir